I tradizionali droni che si muovono orizzontalmente si inclinano leggermente in avanti, ma questo aumenta la loro area di proiezione frontale e, con essa, si trascinano. Gli ingegneri della UC Berkeley hanno proposto (PDF) un sostituto semplice ma efficace per questo meccanismo che non richiede costi energetici aggiuntivi.
Il nuovo design del drone sviluppato in California è stato chiamato QUaRTM (Quadcopter with an unctuated Rotor Tilting Mechanism). Il design include un corpo rettangolare con quattro frecce, all'estremità di ciascuna delle quali è presente un rotore. Le frecce non sono fissate sul corpo immobili, ma sono collegate ad esso da cardini e molle.
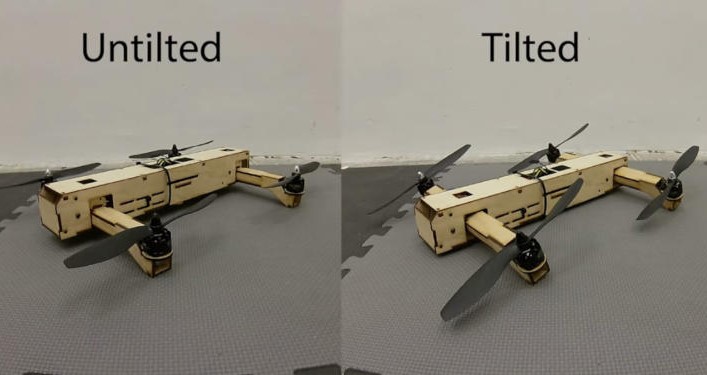
Se la spinta dei rotori è bassa, le molle le mantengono in linea con lo scafo. Quando la spinta raggiunge un certo valore, le pale dell'elica vincono la forza esercitata dalle molle e le frecce si inclinano fino a 20°. Di conseguenza, il drone si sposta in avanti mantenendo una posizione orizzontale del corpo, in cui la resistenza aerodinamica è minima. Ancora più importante, il design della molla non richiede l'installazione di unità aggiuntive: tutto il lavoro viene svolto dalla spinta creata dai rotori.
Durante i voli di prova, QUaRTM ha preso il volo con il meccanismo di inclinazione bloccato e sbloccato. Gli autori del progetto hanno scoperto che con il meccanismo sbloccato, la velocità massima del drone è superiore del 12,5%, la manovrabilità è aumentata - la "velocità di crociera fail-safe" massima è aumentata del 7,5% - e il consumo di energia a una velocità la gamma da 15 a 20 m / s è ridotta di oltre il 20%.
2022-09-20 14:45:46
Autore: Vitalii Babkin