従来の水平移動ドローンはわずかに前方に傾いていますが、これにより正面の投影領域が増加し、それに伴って抗力が生じます。カリフォルニア大学バークレー校のエンジニアは、追加のエネルギー コストを必要としない、このメカニズムのシンプルで効果的な代替案 (PDF) を提案しました。
カリフォルニアで開発された新しい無人機の設計は、QUaRTM (非作動ローター傾斜機構を備えた QUadcopter) と呼ばれていました。このデザインには、4つの矢印が付いた長方形の本体が含まれており、それぞれの端にローターがあります。矢は動かずに本体に固定されているのではなく、ヒンジとバネで本体に接続されています。
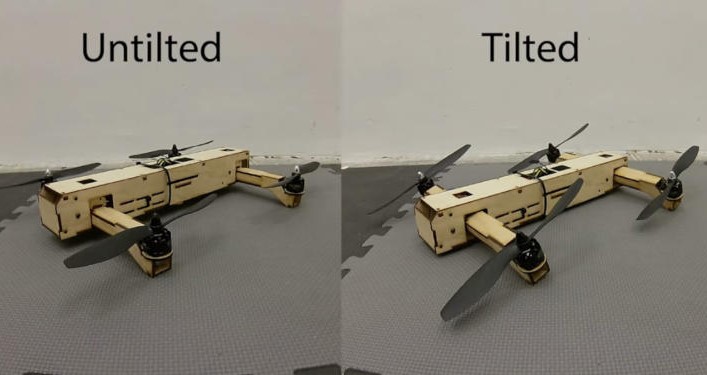
ローターからの推力が低い場合、スプリングはローターを船体と一直線に保ちます。推力が特定の値に達すると、プロペラ ブレードがスプリングの力に打ち勝ち、矢印が 20 ° まで傾きます。その結果、ドローンは機体の水平位置を維持しながら前進し、空力抵抗が最小限に抑えられます。さらに重要なことに、スプリングの設計では追加のドライブを取り付ける必要がありません。すべての作業は、ローターによって生成される推力によって行われます。
テスト飛行中、QUaRTM はチルト機構をロックおよびロック解除した状態で空中に飛び出しました。プロジェクトの作成者は、メカニズムのロックを解除すると、ドローンの最大速度が12.5%速くなり、操縦性が向上することを発見しました-最大「フェイルセーフ巡航速度」が7.5%増加し、速度での電力消費が増加します15 ~ 20 m/s の範囲が 20% 以上減少します。
2022-09-20 14:45:46
著者: Vitalii Babkin