Os drones tradicionais que se movem horizontalmente se inclinam ligeiramente para a frente, mas isso aumenta sua área de projeção frontal e, com isso, o arrasto. Os engenheiros da UC Berkeley propuseram (PDF) um substituto simples, mas eficaz, para esse mecanismo que não requer custos adicionais de energia.
O novo design de drone desenvolvido na Califórnia foi chamado de QUARTM (Quadcopter com um mecanismo de inclinação do rotor não atuado). O projeto inclui um corpo retangular com quatro setas, na extremidade de cada uma delas há um rotor. As setas não são fixadas no corpo imóvel, mas são conectadas a ele por dobradiças e molas.
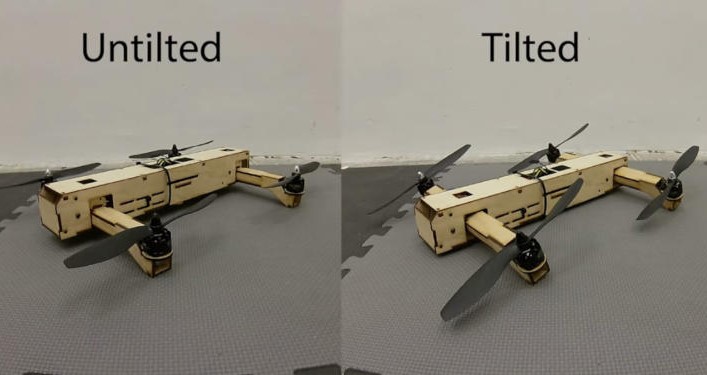
Se o impulso dos rotores for baixo, as molas os mantêm alinhados com o casco. Quando o empuxo atinge um determinado valor, as pás da hélice superam a força exercida pelas molas e as flechas se inclinam até 20°. Como resultado, o drone se move para frente mantendo uma posição horizontal do corpo, na qual o arrasto aerodinâmico é mínimo. Mais importante, o design da mola não requer a instalação de acionamentos adicionais - todo o trabalho é feito pelo empuxo criado pelos rotores.
Durante os voos de teste, o QUARTM decolou com o mecanismo de inclinação travado e destravado. Os autores do projeto descobriram que, com o mecanismo desbloqueado, a velocidade máxima do drone é 12,5% maior, a manobrabilidade é aumentada - a "velocidade de cruzeiro à prova de falhas" máxima é aumentada em 7,5% - e o consumo de energia a uma velocidade intervalo de 15 a 20 m / s é reduzido em mais de 20%.
2022-09-20 14:45:46
Autor: Vitalii Babkin