Herkömmliche Drohnen, die sich horizontal bewegen, neigen sich leicht nach vorne, aber dies erhöht ihre frontale Projektionsfläche und damit den Luftwiderstand. Ingenieure der UC Berkeley haben einen einfachen, aber effektiven Ersatz für diesen Mechanismus vorgeschlagen (PDF), der keine zusätzlichen Energiekosten erfordert.
Das in Kalifornien entwickelte neue Drohnendesign hieß QUARTM (QUAdcopter with an unactuated Rotor Tilting Mechanism). Das Design umfasst einen rechteckigen Körper mit vier Pfeilen, an deren Ende sich jeweils ein Rotor befindet. Pfeile sind nicht bewegungslos am Körper befestigt, sondern durch Scharniere und Federn mit ihm verbunden.
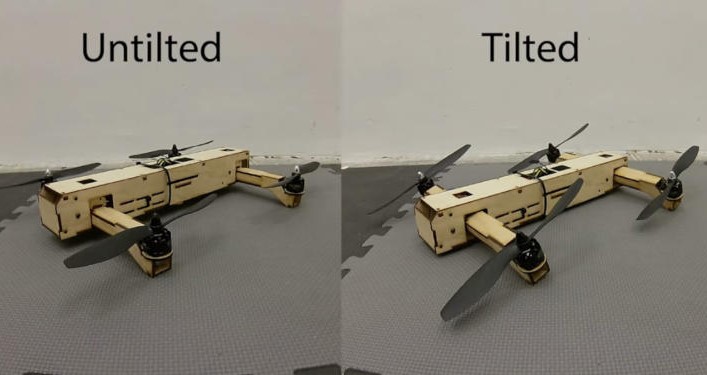
Wenn der Schub der Rotoren gering ist, halten die Federn sie in einer Linie mit dem Rumpf. Wenn der Schub einen bestimmten Wert erreicht, überwinden die Propellerblätter die von den Federn ausgeübte Kraft und die Pfeile neigen sich um bis zu 20 °. Infolgedessen bewegt sich die Drohne vorwärts, während sie eine horizontale Position des Körpers beibehält, in der der Luftwiderstand minimal ist. Noch wichtiger ist, dass das Federdesign keine Installation zusätzlicher Antriebe erfordert - die gesamte Arbeit wird durch den Schub erledigt, der von den Rotoren erzeugt wird.
Bei Testflügen flog QUARTM mit gesperrtem und entsperrtem Kippmechanismus in die Luft. Die Autoren des Projekts stellten fest, dass bei entsperrtem Mechanismus die Höchstgeschwindigkeit der Drohne um 12,5% höher ist, die Manövrierfähigkeit erhöht wird - die maximale "ausfallsichere Reisegeschwindigkeit" um 7,5% erhöht wird - und der Stromverbrauch bei einer Geschwindigkeit liegt Reichweite von 15 bis 20 m/s um mehr als 20 % reduziert.
2022-09-20 14:45:46
Autor: Vitalii Babkin