기존의 수평 이동 드론은 약간 앞으로 기울어지지만 이로 인해 정면 투영 영역이 증가하고 그에 따라 끌립니다. UC Berkeley 엔지니어는 추가 에너지 비용이 필요하지 않은 이 메커니즘에 대한 간단하지만 효과적인 대체품을 제안했습니다(PDF).
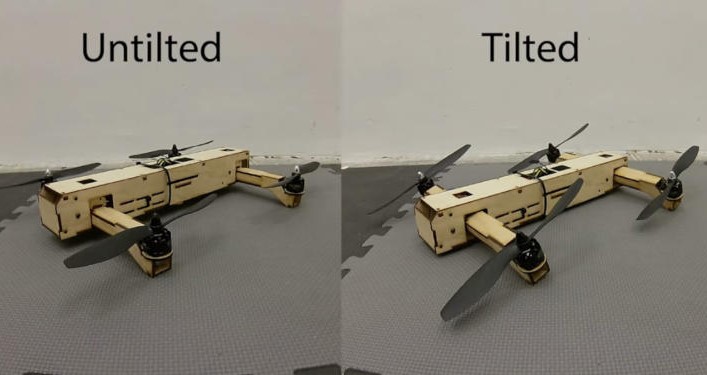
캘리포니아에서 개발된 새로운 드론 디자인은 QUaRTM(비작동 로터 틸팅 메커니즘이 있는 QUadcopter)이라고 불렸습니다. 디자인에는 4개의 화살표가 있는 직사각형 몸체가 포함되어 있으며 각 끝에는 로터가 있습니다. 화살표는 몸에 움직이지 않고 고정되어 있지 않고 경첩과 스프링으로 연결되어 있습니다.
로터의 추력이 낮으면 스프링이 로터를 선체와 일직선으로 유지합니다. 추력이 특정 값에 도달하면 프로펠러 블레이드가 스프링이 가하는 힘을 극복하고 화살표가 20°까지 기울어집니다. 그 결과, 드론은 공기역학적 항력이 최소화된 몸체의 수평 위치를 유지하면서 앞으로 이동합니다. 더 중요한 것은 스프링 설계에 추가 드라이브를 설치할 필요가 없다는 것입니다. 모든 작업은 로터에 의해 생성되는 추력에 의해 수행됩니다.
테스트 비행 중에 QUARTM은 틸트 메커니즘을 잠그고 잠금 해제한 상태로 하늘을 날았습니다. 프로젝트의 저자는 메커니즘이 잠금 해제되면 무인 항공기의 최대 속도가 12.5% 더 높고 기동성이 증가한다는 것을 발견했습니다. 최대 "안전한 순항 속도"가 7.5% 증가하고 속도에서의 전력 소비 15~20m/s의 범위는 20% 이상 감소합니다.
2022-09-20 14:45:46
작가: Vitalii Babkin