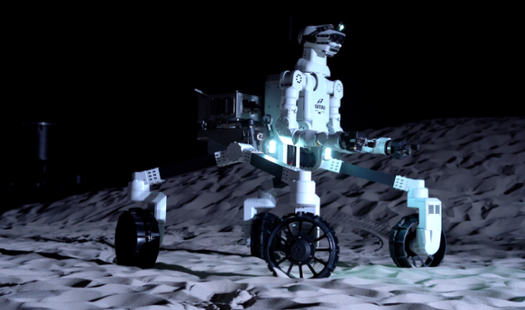
Die Möglichkeit, den Mond zu erforschen und eine vollwertige Basis auf seiner Oberfläche zu bauen, wird von Spezialisten aus verschiedenen Ländern untersucht. Das japanische Unternehmen GITAI beabsichtigt, zur Besiedlung des natürlichen Satelliten der Erde beizutragen, dessen Spezialisten einen vierrädrigen Robotermechanismus R1 mit Manipulatorarmen entwickelt haben, der verschiedene Aufgaben auf dem Mond ausführen soll.
Den verfügbaren Daten zufolge wurde der Zentaur-Roboter R1 im Dezember letzten Jahres auf dem Testgelände der Japan Aerospace Exploration Agency (JAXA) getestet, das das Mondgelände simuliert. Es wird darauf hingewiesen, dass R1 während einer Reihe von Tests verschiedene Aufgaben erfolgreich bewältigt hat, darunter einen Test auf Mobilität und die Fähigkeit, Hindernisse zu überwinden. Es gelang ihm auch, eine Solaranlage zusammenzubauen, Proben von Ressourcen von der Oberfläche der Deponie zu nehmen und einen sandigen Hügel mit einer Neigung von 15-20° zu erklimmen.
Das Design des robotischen Geländewagens verfügt über vier Räder mit einem Drehwinkel von 360 °, die dazu beitragen, sich reibungslos zu bewegen und Hindernisse erfolgreich zu überwinden. Dieser Ansatz ermöglicht es, sich bei Bedarf seitlich zu bewegen und Hügel mit einem Neigungswinkel von bis zu 20 ° anzufahren. In Anwesenheit einer Taschenlampe, Waffenmanipulatoren und mehrerer Kameras. R1 wird von einem ferngesteuerten Bediener gesteuert, der dafür VR-Controller verwendet.
Was GITAI betrifft, so entwickelt ein japanisches Startup Robotergeräte, die bei der Erforschung des menschlichen Weltraums nützlich sein könnten. Das Startup plant, bis 2040 ein gleichberechtigter Partner der weltweit führenden Luft- und Raumfahrtunternehmen zu werden und kostengünstige und sichere Roboter für den Bau von Städten auf Mond und Mars zu entwickeln.
2022-02-16 07:18:54
Autor: Vitalii Babkin