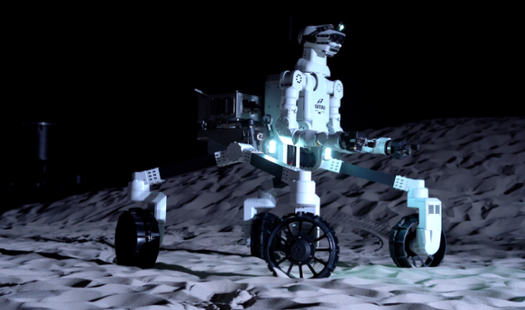
달을 탐사하고 표면에 본격적인 기지를 건설할 가능성은 여러 나라의 전문가들에 의해 연구되고 있습니다. 일본 회사 GITAI는 달에서 다양한 작업을 수행하도록 설계된 조작기 팔이 있는 4륜 로봇 메커니즘 R1을 만든 전문가가 지구의 자연 위성의 식민지화에 기여하려고 합니다.
입수 가능한 데이터에 따르면 지난해 12월 R1 켄타우로스 로봇은 달 지형을 시뮬레이션하는 일본항공우주탐사국(JAXA)의 시험장에서 시험을 받았다. 일련의 테스트에서 R1은 이동성 및 장애물 극복 능력 테스트를 포함하여 다양한 작업에 성공적으로 대처했습니다. 그는 또한 태양 전지판을 조립하고 매립지 표면에서 자원 샘플을 채취했으며 경사가 15-20°인 모래 언덕을 오를 수 있었습니다.
로봇식 전지형 차량의 설계에는 360° 회전 각도의 4개의 바퀴가 있어 원활하게 이동하고 장애물을 성공적으로 극복하는 데 도움이 됩니다. 이 접근 방식을 사용하면 필요한 경우 옆으로 이동할 수 있을 뿐만 아니라 최대 20°의 경사각으로 언덕을 호출할 수 있습니다. 손전등, 팔 조작기 및 여러 대의 카메라가있는 곳. R1은 원격에 있는 운영자가 제어하고 이를 위해 VR 컨트롤러를 사용합니다.
GITAI의 경우 일본 스타트업이 인간의 우주 탐사 과정에 유용할 수 있는 로봇 장치를 개발하고 있습니다. 이 스타트업은 2040년까지 세계 최고의 항공우주 회사와 동등한 파트너가 되어 달과 화성에 도시를 건설하기 위한 저렴하고 안전한 로봇을 만들 계획입니다.
2022-02-16 07:18:54
작가: Vitalii Babkin