月を探索し、その表面に本格的な基地を建設する可能性は、さまざまな国の専門家によって研究されています。日本の企業GITAIは、地球の衛星の植民地化に貢献する予定です。その専門家は、月でさまざまなタスクを実行するように設計された、マニピュレーターアームを備えた四輪ロボットメカニズムR1を作成しました。
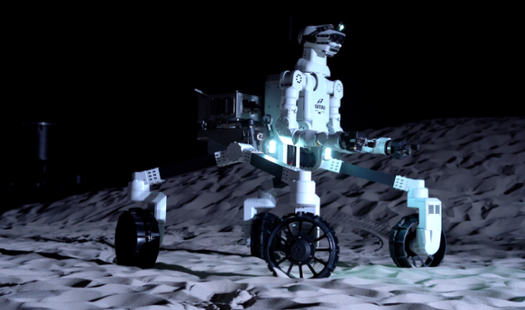
入手可能なデータによると、昨年12月、月の地形をシミュレートする宇宙航空研究開発機構(JAXA)のテストサイトでR1ケンタウロスロボットがテストされました。一連のテスト中に、R1は、移動性や障害物を克服する能力のテストなど、さまざまなタスクに正常に対処したことに注意してください。彼はまた、ソーラーアレイを組み立て、埋め立て地の表面から資源のサンプルを採取し、15〜20°の傾斜の砂丘を登ることができました。
ロボット全地形対応車の設計には、360°の回転角を持つ4つの車輪があり、スムーズに移動して障害物をうまく乗り越えるのに役立ちます。このアプローチにより、必要に応じて横に移動したり、最大20°の傾斜角を持つヒロックを呼び出すことができます。懐中電灯、武器マニピュレーター、およびいくつかのカメラの存在下で。 R1は、リモートにいるオペレーターによって制御され、このためにVRコントローラーを使用します。
GITAIに関しては、日本の新興企業が有人宇宙探査の過程で役立つ可能性のあるロボット装置を開発しています。このスタートアップは、2040年までに世界をリードする航空宇宙企業の対等なパートナーとなり、月と火星に都市を建設するための安価で安全なロボットを作成することを計画しています。
2022-02-16 07:18:54
著者: Vitalii Babkin