浙江大学のChaoXu教授と大学院生のFeiGaoが率いる中国人エンジニアのチームがドローンを作成し、そのようなドローンを群れで動かすことができるアルゴリズムを開発しました。
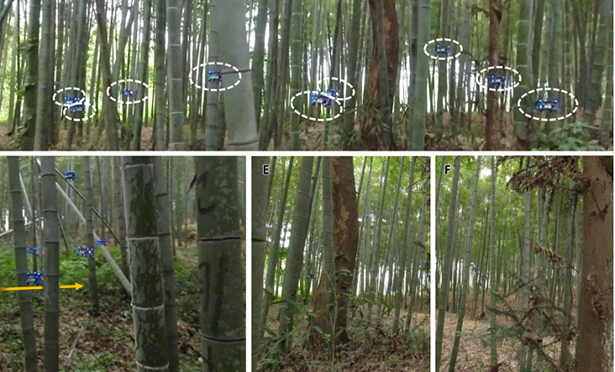
アルゴリズムを使用すると、群れは森の中でも自由に動くことができます-科学者は竹の茂みでの動きの例によってこれを実証しました。ドローンは、比較的正確な相対位置データを提供するUWBトランシーバーを使用して常に相互に情報を交換するため、障害物を回避する際のドローン間の衝突の可能性が低くなります。ドローンはGPSをサポートしておらず、視覚慣性航法を使用しています。カメラからのデータと、加速度計とジャイロスコープを備えたブロックです。
スペシャリストは、地図とGPSナビゲーションが事前にインストールされていない10台のドローンが森の中を移動し、群れの構造を維持しながら木を避けているビデオをいくつか見せました。移動する障害物を効果的に回避し、人を追跡するそのようなドローンの能力も実証されています。
ドローンは、コンパクトなNVIDIA Xavier NXスーパーコンピューター、Intel RealSense D430デプスカメラ、PX4オートパイロットフライトコントローラーを搭載したクワッドコプターです。このようなドローンの重量はわずか300gで、バッテリー容量は11分間の飛行に十分です。
群れの形でドローンを動かす能力は、軍と民間の両方の目的に使用できます。たとえば、ドローンの群れは、ガス漏れの場所を見つけるためのセンサーの分散セットとして使用されました。
2022-05-09 05:41:56
著者: Vitalii Babkin