Zhejiang University 교수 Chao Xu와 대학원생 Fei Gao가 이끄는 중국 엔지니어 팀은 드론을 만들고 여러 대의 드론이 무리를 지어 이동할 수 있도록 하는 알고리즘을 개발했습니다.
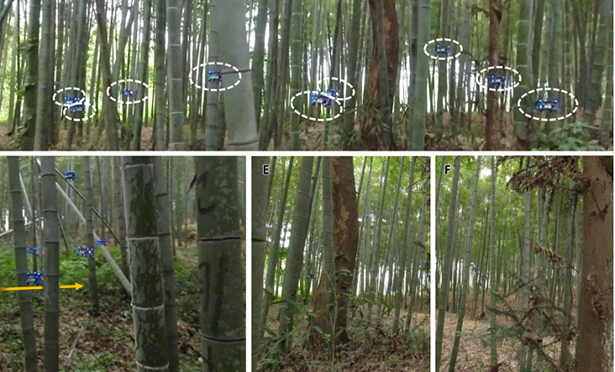
알고리즘을 사용하여 떼는 숲에서도 자유롭게 이동할 수 있습니다. 과학자들은 대나무 덤불에서 움직이는 예를 통해 이를 입증했습니다. 드론은 상대적으로 정확한 상대 위치 데이터를 제공하는 UWB 트랜시버를 사용하여 지속적으로 서로 정보를 교환하므로 장애물을 피할 때 드론 간의 충돌 가능성이 줄어듭니다. 드론은 GPS를 지원하지 않으며 카메라의 데이터와 가속도계 및 자이로스코프가 있는 블록과 같은 시각적 관성 탐색을 사용합니다.
전문가들은 지도와 GPS 내비게이션이 설치되지 않은 드론 10대가 떼 구조를 유지하면서 나무를 피해 숲 속을 이동하는 영상을 여러 편 보여주었다. 움직이는 장애물을 효과적으로 피하고 사람을 따라가는 이러한 드론의 능력도 입증되었습니다.
드론은 소형 NVIDIA Xavier NX 슈퍼컴퓨터, Intel RealSense D430 깊이 카메라 및 PX4 자동 조종 비행 컨트롤러가 장착된 쿼드로콥터입니다. 이러한 드론의 무게는 300g에 불과하며 배터리 용량은 11분 동안 비행하기에 충분합니다.
군집 형태로 드론을 움직이는 능력은 군사 및 민간 목적 모두에 사용될 수 있습니다. 예를 들어, 드론 떼는 가스 누출 위치를 찾기 위한 분산 센서 세트로 사용되었습니다.
2022-05-09 05:41:56
작가: Vitalii Babkin